Trolley point clouds
The trolley has been used to create indoor point clouds.
For the master thesis, 3 point clouds have been conducted:
- The second floor of the Fraunhofer FOKUS building, located in Berlin, Germany.
- All accessible rooms of within the second floor of the FOKUS building.
- The DCAITI (4th floor of the TEL building of the TU-Berlin), located in Berlin, Germany. It can be viewed here
The different classes can be visualized inside the Potree viewer. The available point cloud has been downsampled to 2cm resolution before semantic labeling. The full cloud can be seen here.
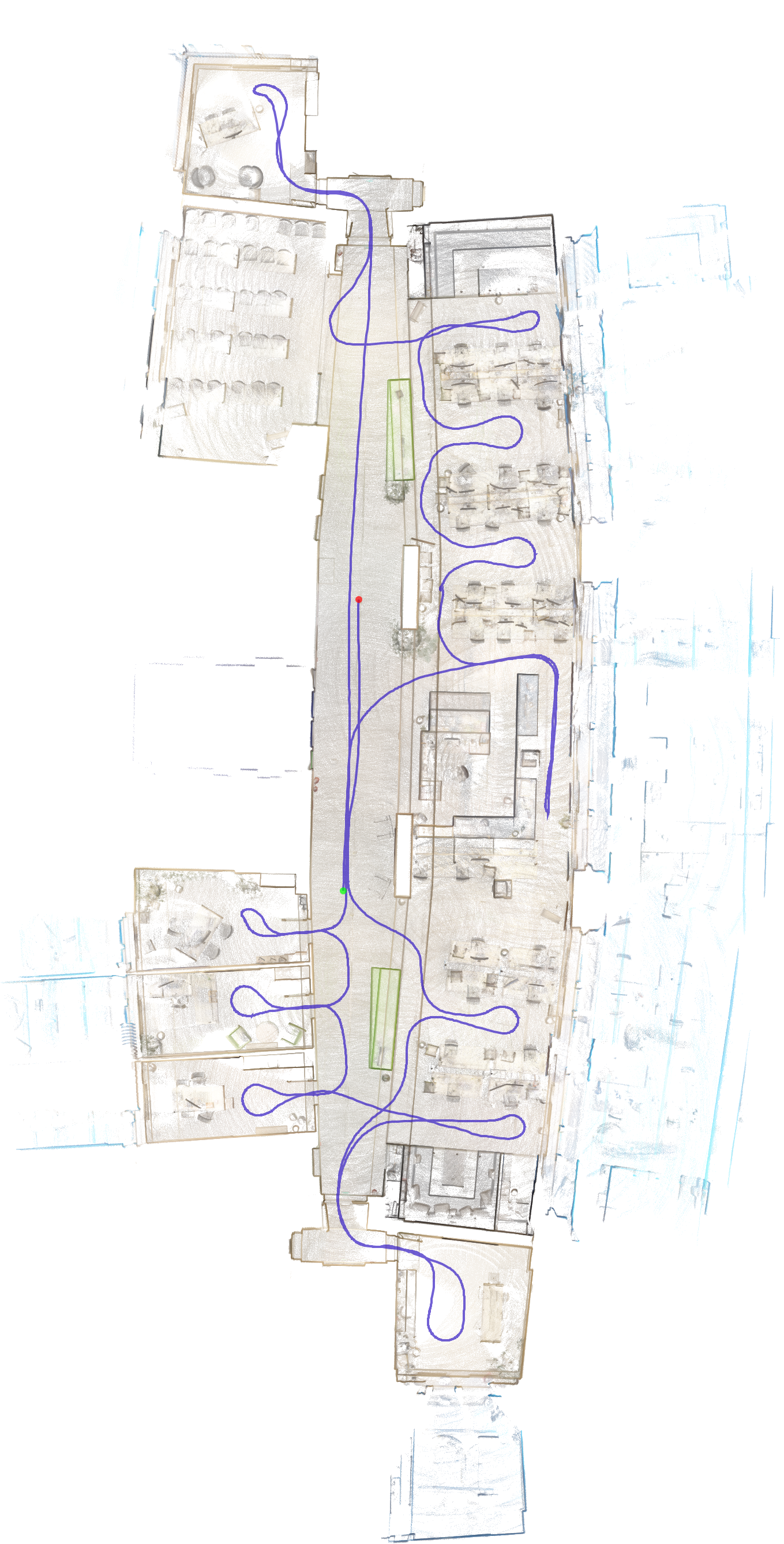


Compared to the backpack platforms, the trolley is only moved in the horizontal plane. This reduces the SLAM problem from 3D to 2D, decreasing the localization error as well as increasing the algorithm speed and accuracy.
The video below shows a camera flight over the DCAITI point cloud both with RGB colors as well as different colors for each class label. The visualizations on the lower side of the video have the labels ‘clutter’ and ‘ceiling’ hidden. The remaining points will be used for further training/testing of deep learning algorithms.